ダンス掲示板
WDSF/1でロアー(脚) - ダンキチ
2024/03/27 (Wed) 11:58:47
管理人様
この際、ペンデイングとなっている下記のやり取りの点について管理人のお考えを確認させて頂きたいと思います。よろしくお願いします。
(ダンキチ)
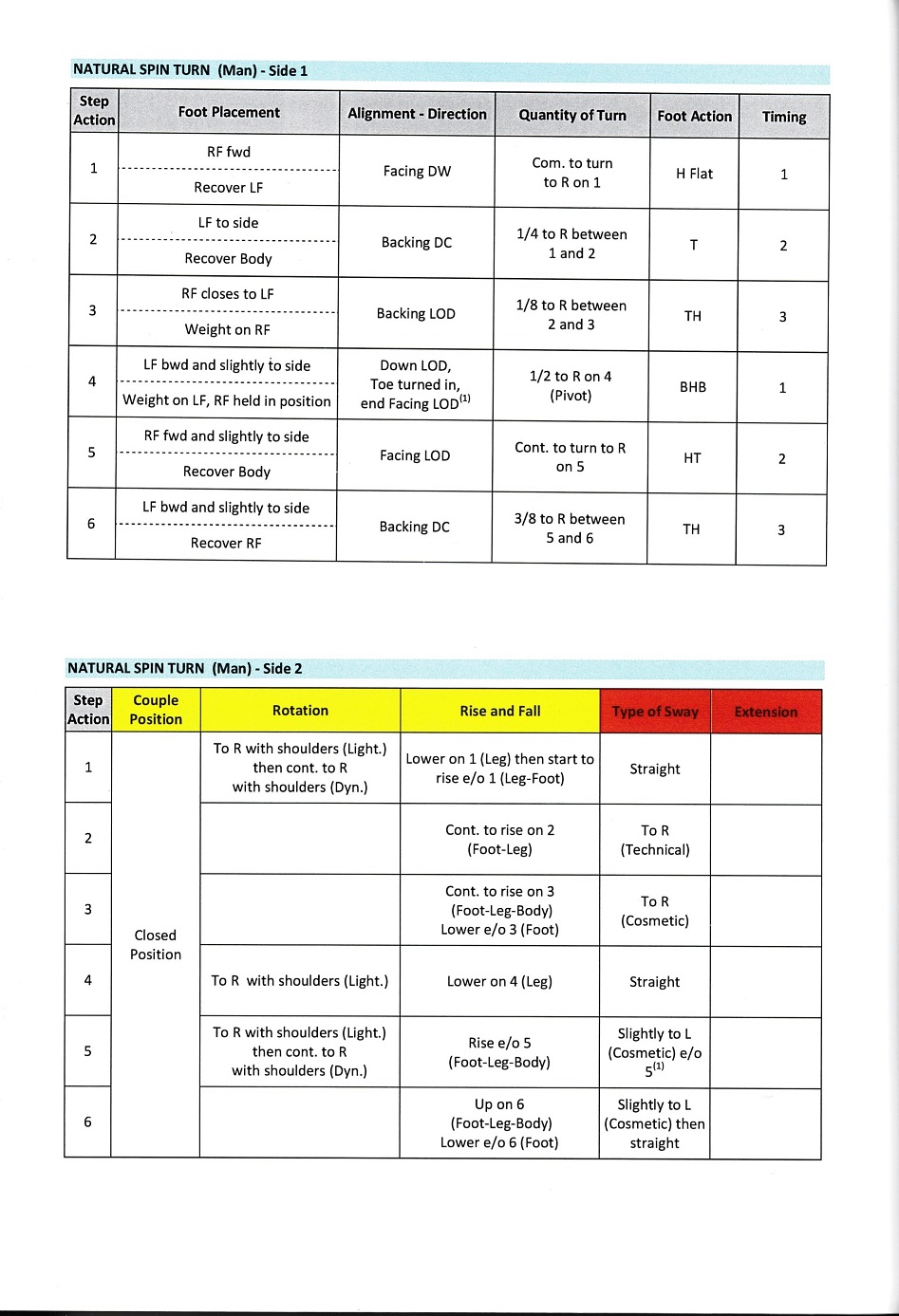
WDSFではナチュラルターンの1歩目右足は「Lower on 1(Leg)」となっているがこれは1歩目右足が前進中(ムービングレッグ)の時に行われるのか?
(管理人様)
違う。Leg lowerは支え足の上で行われる。
(ダンキチ)
それではLeg Lowerが行われる支え足とは右足上か、それとも左足上か?
(管理人様)
前歩でフットロアーした左足上で行われる
(ダンキチ)
フットロアーした同じ左足上でレッグロアーが行われるということは次のナチュラルターンの1歩目はロアーの状態から始まると言うことか?
(管理人様)
ダンキチが言ってる事がよくわからない。
管理人様
最後の私の質問は「次のようにご理解ください」
ナチュラルターンの前歩であり、支え足でもある左足の上でフットロアーと同時にレッグロアーも行われるのであれば次のステップ、すなわちナチュラルターンの1歩目はロアーの状態から前進が始まるのですか? というのが質問です。
Re: WDSF/1でロアー(脚) - 管理人
2024/03/27 (Wed) 13:43:38
 ダンキチさん
ダンキチさん
何を議論しようとされているのか、本当によく分からないのですが、私の理解を順を追って記させていただきます。
先行歩がシャッセ・フロム・PPだとします。
4歩目の左足は、lower e/o 4(foot)です。
AA
ナチュラル・ターンの1歩目は、左足がフット・ロァーしたとき、すなわち、ニュートラル・ポジションが区切り点です。
1歩目は、lower on 1(leg)から始まります。
BB
1歩目右足を前進させるためのロァー(レッグ)、レジストのため、支え足である左足がLeg lowerします。
次いで、then start to rise on e/o 1(leg-foot)です。
CC
コントロールで中間バランスとなったとき(レッグ・ロァーの最も低い頭の高さ)以降、左足でプッシュされた時点で、支え足が左足から右足に交替します。
次の左足を前進させるための準備として、まず、支え足である右足がレッグ・ライズして、リカバーでニュートラル・ポジションに戻ります。
DD
次いで、ムービング・フットである左足が右足のトーを越えたところで、支え足である右足のヒールが床から離れ、右足によるフット・ライズが始まります。ここから、ライズが終了するまで、レッグ・ライズも継続します。
Re: WDSF/1でロアー(脚) - ダンキチ
2024/03/27 (Wed) 20:34:25
管理人様
WDSFのドライブアクションに沿った考え方をされているということですね。
それではWDSFの「足の位置」に書かれた「ステップの最終位置」の定義を見て下さい
JDSFの和訳は心もとないのでWDSFの定義を下記します。
1. Recover Body・・・The body moves fully over the standing leg: the moving leg is not fully recovered.
2. Recover Foot・・・ The body moves fully over the standing leg: the moving leg is fully recovered under the body.
3. Weight on Foot・・・A full weight transferral is made but the body does not always move over the standing leg.
この定義からすると(1)Lower(2)Resistではボデイ(重心)は未だ支え足(左足)の上に残っており前歩のポジションにあります。
そして次の前進歩、すなわちナチュラルターンの1歩目は(3)Controlになって初めて始まることになります。
管理人様のお考えと明らかに違っています。
どのように考えれば良いのでしょうか。
Re: WDSF/1でロアー(脚) - 管理人
2024/03/27 (Wed) 20:59:09
ダンキチさん
もともとダンキチさんは、フット・ロァーとレッグ・ロァーが別物であるということを区別されていません。
シャッセ・フロム・PPの4歩目のリカバー・フットは、ちょうど両足が揃ったところは、まさにフット・ロァーが完了したところで、ニュートラル・ポジションにあります。
ここが4歩目の終わり=1歩目の始まりであることは、明白です(テキストに書いてあるとおりです)。
この時点では、左足が支え足ですから、(1)Lower(2)Resistでボデイ(重心)が未だ支え足(左足)の上に残っているのは極めて論理的です。
テキストの1歩というのは、この場合、4歩目のリカバー・フットから1歩目のリカバー・フットまでを言うのであり、コントロールは、1歩目のちょうど中間地点です。
1歩目の既に半分終わった地点をステップの区切り点(1歩目の始まり地点)とするのは非合理的です。
そもそもそんな状態からステップを開始することはできません。
繰り返しになりますが、4歩目の終わりは、「両足が揃った瞬間」であり、1歩目の終わりは、「両足が揃った瞬間」ですから、その2つの地点がステップの区切り点です。(1)Lower(2)Resistは、無関係です。何故なら、既に次のステップに入っているからです(lower on 1(leg))。
Re: WDSF/1でロアー(脚) - ダンキチ
2024/03/28 (Thu) 10:15:28
 管理人様
管理人様
先般も参照した添付22年度ロシアチャンピオンシップのEvgenyの踊りを参照します。
https://www.youtube.com/watch?v=ugjILEmZGKw
右側スナップはEvgenyのナチュラルターンに入る前、のシャッセフロムPPの最終歩の着地点を示しています。
彼の左足はFlatの状態になっており、既にレッグロアーも始まっています。
レッグロアーが始まっていると言うことは管理人様が言う最終歩4歩目のフットロアーは完了し(ニュートラルポジション)、レッグロアーに入っている筈ですが右足はリカバーどころかはるかまだ右後方に残っています。
次に左のスナップを見て下さい。
4歩目最終歩、左足に右足がリカバーしたポイントのショットです。
このポイントでは両足が揃い重心は支え足の上に乗っています。そしてフットロアーもレッグロアーも完了したポイントになっています。
このEvgenyの踊り方はWDSFの教科書のチャート(管理人様の説明)そしてドライブアクションの説明とは明らかに異なった踊り方になっています。
Evgenyの踊り方はWDSFが「足の位置」で定義したステップの区切り点の法則にのっとり、ボルテクが書いている踊り方と全く同じ踊り方をしているのです。
(支え足の上に重心が乗り切ったポイントがステップの区切り点)
Evegenyは3回ほど同じシャッセフロムppを踊っています。他のダンサーの踊り方もチェックしてみてください。
いずれにしてもWDSFのチャート、ドライブアクションの説明、管理人様のお考えは実際の踊りとは大きく異なっているのだと思います。
何故こんなことになるのでしょうか。
私はWDSFのロアーする時のステップの区切り点に問題があるのだと考えています。
もし疑問に思われる場合はシャッセフロムPPの4歩目でフットリカバリー完了、フットロアー完了かつニュートラルなダンサーのスナップショットをご用意いただければ幸いです。
Re: WDSF/1でロアー(脚) - 管理人
2024/03/28 (Thu) 10:22:27
ダンキチさん
実際のダンスは進化しています。
ご指摘の踊り方は、WDSFのテクニック・ブックに沿ったものではないと私も思います。
だからボルテクに沿っているなどは、全く言えません。